서울과학기술대학교 기계자동차공학과 조교수 정용환

아침 출근길. 커피 한 잔을 손에 들고 차에 올라탄 순간, 차량이 별도의 제어 활동 필요 없이 스스로 운전을 시작한다면 어떨까요? 아마 차창 밖으로 펼쳐지는 도시의 풍경을 바라보거나, 오늘의 뉴스 헤드라인을 확인하거나, 중요한 업무 메일을 체크할 여유가 생길 것입니다.
과거에는 공상과학 영화나 상상을 통해서만 가능했던 일이 이제는 점점 현실로 다가오고 있습니다. 바로 ‘자율주행’ 기술 덕분입니다. 그렇다면, 자율주행을 가능하게 만드는 핵심 기술은 무엇일까요? 지금부터 자율주행의 심장이라고 할 수 있는 주요 기술들에 대해 알아보겠습니다.
자율주행 핵심기술 ① 시각 정보 기술 ‘라이다’와 ‘비전’
자율주행은 사람을 대신하여 ① 자동차가 스스로 주행 환경을 ‘인지’하고 ② 이를 바탕으로 상황을 ‘판단’하며 ③ 판단에 따라 안전하게 주행할 수 있도록 차량을 ‘제어’하는 기술을 의미합니다. 이중 가장 첫 단계인 ‘인지’는 사람으로 따지자면 도로의 정보를 시각을 활용하여 파악하는 과정에 해당합니다. ‘라이다’와 ‘비전’은 사람의 눈을 대신하여 주행 환경을 인식하는 핵심 기술로 꼽히죠.
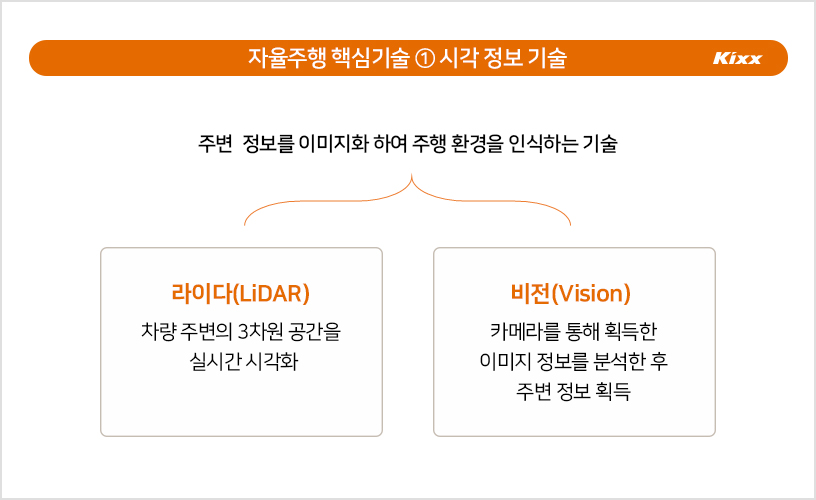
먼저 ‘라이다(LiDAR: Light Detection And Ranging)’는 자율주행 기술을 구현하기 위한 핵심 센서입니다. 레이저 펄스를 발사하여 반사된 빛을 분석하여 주변 정보를 이미지화 합니다.
최근 ADAS(첨단 지능형 운전자 보조 시스템)를 뛰어 넘는 기술로 주목받고 있는 라이다 센서의 개념은 사실 이미 약 100년 전에 등장했습니다. 1930년대 아일랜드의 물리학자인 에드워드 허친슨 신지(Edward Hutchinson Synge)가 고안했죠. 그는 당시 강력한 탐조등인 서치라이트를 이용해 대기를 조사하는 방식을 구상했는데, 1960년에 들어서 휴즈 항공산업이 이 방식의 대기 측정 시스템을 도입하면서 본격적으로 산업 현장에 등장했습니다. 그리고 이후 점차 소형화·첨단화 되어 현재는 △항공 △우주 △지질 분석 △로봇 △자율주행 등의 분야에서 널리 활용되고 있습니다.
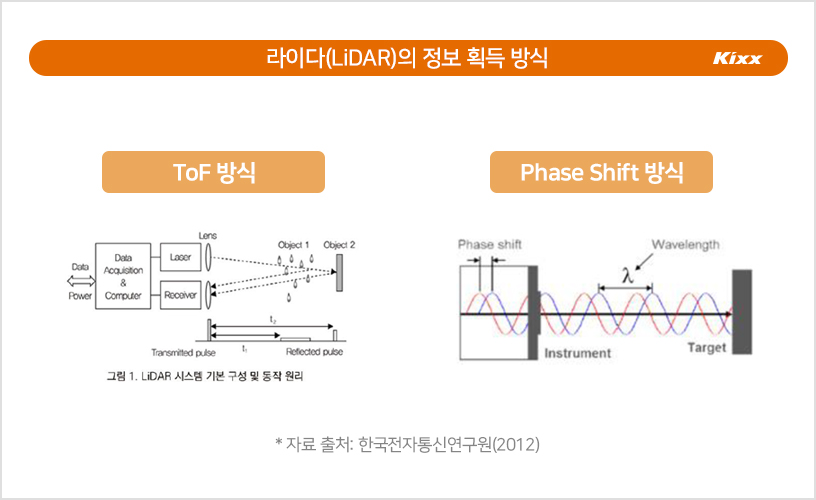
라이다는 빛의 일종인 레이저를 이용하여 주변을 스캐닝하기 때문에 매우 정확하게 거리 및 방위 정보를 획득할 수 있습니다. △라이다에서 발산한 빛이 반사되어 돌아오는 시간을 측정하는 ToF(Time of Flight) 방식, 또는 △라이다가 발산한 빛과 반사되어 되돌아온 빛의 위상 변화량을 측정하는 위상변이(Phase shift) 방식으로 거리를 측정하죠. 특히 먼 거리의 객체들을 인식해야 하는 차량환경에서는 일반적으로 ToF 방식이 사용되고 있습니다.
라이다는 매 측정 순간마다 수천개의 빛을 발사하여 차량 주변의 3차원 공간을 실시간으로 시각화합니다. 이를 통해 사람의 눈으로 직접 본 것과 같은 주행 환경을 구현해 내는 것입니다.
그런데 라이다처럼 사람의 눈과 흡사하게 세상을 바라볼 수 있는 장치가 있습니다. 바로 카메라입니다. 카메라는 빛을 인식한다는 점에서 사람의 눈과 매우 흡사한 구조를 가지고 있습니다. 카메라의 렌즈는 눈의 각막 및 수정체의 역할을 하고, 이미지 센서는 망막의 역할을 하죠.
자율주행을 실현하는 또 하나의 시각 정보 기술 ‘비전(Vision)’은 바로 이 ‘카메라’를 통하여 주변 환경의 데이터를 수집합니다.

조금 더 면밀히 들여다보자면, 비전은 차량 주변에 설치된 여러 대의 카메라를 통해 모든 방향의 시각 정보를 수집합니다. 그리고 비전이 탑재된 차량은 카메라를 통해 수집한 정보를 딥러닝 기술로 학습하여 차량 앞에 어떤 장애물이 있는지, 현재 도로의 상황은 어떠한 지 등을 예측하면서 자율주행을 실현합니다.
비전은 사람이 눈으로 보는 것과 가장 유사한 인지 기술이기 때문에 자율주행 기술 구현을 위한 핵심 기술로 평가받고 있습니다. 특히 비전에 탑재되는 카메라는 라이다와 비교했을 때 상대적으로 매우 저렴하기 때문에 자율주행 상용화에 있어 매우 중요한 역할을 할 것으로 보입니다.
한편, 비전 기술 구현을 위한 자율주행용 카메라로는 렌즈가 한 개인 모노 카메라와 두 개의 렌즈를 갖는 스테레오 카메라가 주로 활용됩니다.
이중 스테레오 카메라는 이미지로부터의 거리를 사람이 양쪽 눈을 통해 거리를 인식하는 것과 같은 원리로 계산할 수 있어 모노 카메라 대비 더 정밀한 환경 인식이 가능합니다. 다만 모노 카메라와 비교했을 때 알고리즘의 복잡성이 높아 고성능 프로세서가 요구된다는 것이 단점으로 꼽혀 왔는데요. 최근에는 반도체 기술이 발전을 거듭하면서 일부 차종에 본격적으로 활용되고 있습니다.
하지만 여전히 개선돼야 하는 부분도 있습니다. 신뢰도 높은 비전 기술을 구현하기 위해서는 다량의 데이터에 기반한 딥러닝 기술이 요구되기 때문입니다. 즉, 비전 기반 자율주행차 구현의 열쇠는 자율주행 기술 개발사의 데이터 수집력과 분석 기술력이라고 할 수 있습니다.
자율주행 핵심기술 ② 위치 정보 기술 ‘SLAM 알고리즘’
방안을 자유자재로 돌아다니며 청소하는 로봇청소기. 음식점을 돌아다니며 서비스를 제공하는 서빙 로봇. 이제는 우리 주변에서 쉽게 찾아볼 수 있는 ‘로봇 기술’입니다. 그런데 이 로봇들은 대체 어떻게 실내를 자유롭게 돌아다니며 자신의 역할을 수행하는 것일까요? 이들은 스스로 만든 위치 지도를 활용하여 자신의 위치를 추정합니다. 이를 통해 장애물을 피하기도 하고, 목적지를 찾아 이동할 수도 있죠.
이처럼 미지의 환경을 센서로 스캐닝하여 자신의 위치를 파악하면서 지도를 그려가는 방법을 SLAM(Simultaneous Localization And Mapping)이라고 합니다. SLAM은 운전자의 조작없이 스스로 도로를 주행하는 자율주행차에 있어서도 매우 중요한 기술입니다.
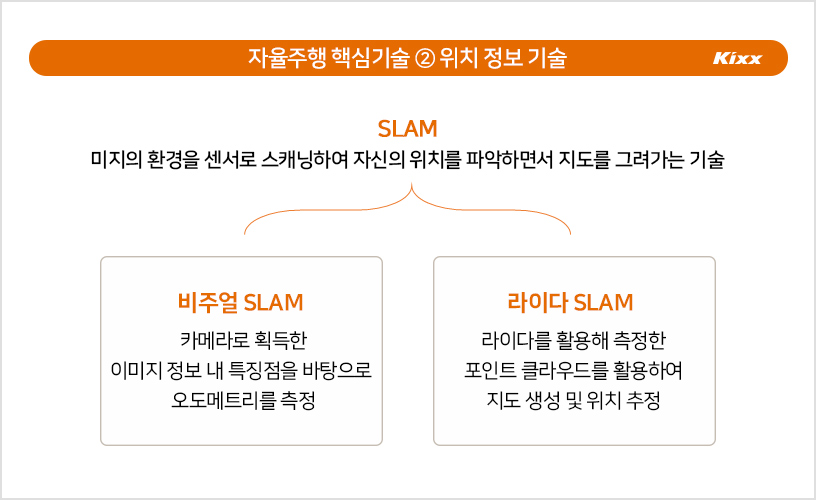
SLAM에서 지도를 그려 나가기 위해서는 센서를 통해 측정한 정보를 쌓아야 합니다. 이때, 사용되는 센서의 종류에 따라 비주얼 SLAM(Visual SLAM)과 라이다 SLAM(LiDAR SLAM)으로 구분됩니다.
이중 비주얼 SLAM은 카메라로 획득한 이미지 정보에서의 특징점의 이동을 바탕으로 오도메트리(Odometry: 모션 센서 데이터를 사용하여 시간 경과에 따른 위치 변화를 추정하는 것)를 측정하여 SLAM 기술을 구현한 것입니다. 비주얼 SLAM은 카메라 종류에 따라 세부적으로 모노 카메라 SLAM과 스테레오 카메라 SLAM으로 나뉩니다.
라이다 SLAM은 라이다를 활용하여 정밀 측정한 포인트 클라우드를 활용하여 지도를 생성하고 위치 추정을 수행합니다. 라이다 SLAM은 비주얼 SLAM과 유사하게 라이다 포인트 클라우드로부터 특징점들을 찾고, 이를 매순간 매칭하여 오도메트리를 측정하는 방식으로 SLAM 기술을 구현합니다. 앞서 소개한바와 같이 라이다는 레이저를 쏘아 주행 환경을 스캐닝하는 방식이기 때문에 비주얼 SLAM과 달리 조도가 낮은 환경에서 SLAM을 구현할 수 있습니다.

또, 최근에는 SLAM의 정확성을 향상시키고 안정적인 위치 추정을 수행할 수 있게 하기 위하여 카메라, 라이다, IMU(Inertial Measurement Unit), GPS 등의 다양한 센서를 활용하는 멀티 센서 퓨전 SLAM(Multi-Sensor Fusion SLAM)이 연구되고 있습니다.
자율주행 핵심기술 ③ 주행 환경 및 정보 통신 기술 ‘V2X’
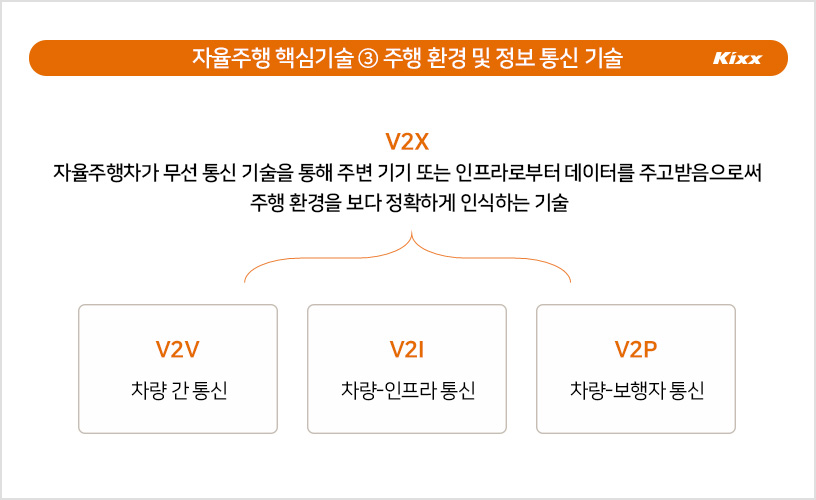
자율주행을 실현하기 위해서는 주행 환경에 대한 정확한 인식이 필요합니다. 하지만, 차량에 장착된 센서에만 의존한다면 사각지대나 인지 성능의 한계로 인해 완벽한 자율주행 구현에 어려움이 따를 수 있습니다. 이러한 한계점을 보완하기 위하여 무선 통신 기술을 통해 자율주행차가 주변 기기 또는 인프라로부터 데이터를 주고받음으로써 주행 환경을 보다 정확하게 인식하는 기술을 ‘V2X(Vehicle-to-Everything)’라고 부릅니다. 그리고 이는 자율주행차와 소통할 수 있는 대상이 무엇인지에 따라 다음과 같은 하위 기술로 구성됩니다.
1) V2V(Vehicle to Vehicle)
차량 간의 통신 기술을 의미합니다. 차량간 통신을 통해 각자의 위치, 속도 정보와 주변 교통 상황 정보 등을 공유하며 자율주행차의 인식 범위를 확장할 수 있습니다.
2) V2I(Vehicle to Infrastructure)
차량과 도로변에 설치된 기지국과의 통신을 통해 인프라와 통신하는 기술을 의미합니다. 인프라는 V2I로 연결된 차량의 주행 정보를 수집하여 중앙 서버에서 분석하게 됩니다. 이를 통해 차량은 인프라로부터 교통상황 및 사고정보 등 차량에서 직접 인식할 수 없는 정보를 얻을 수 있습니다.
3) V2P(Vehicle to Pedestrian)
차량과 보행자 간의 통신 기술을 의미합니다. 차량은 V2P를 통해 보행자의 위치와 이동 경로를 정확하게 파악할 수 있어 추돌 사고 등을 사전에 방지할 수 있습니다. 또한 차량의 이동 정보를 주변의 보행자에게 송신함으로써 보행자의 향후 이동 경로를 결정하는 데 도움을 줄 수 있습니다.
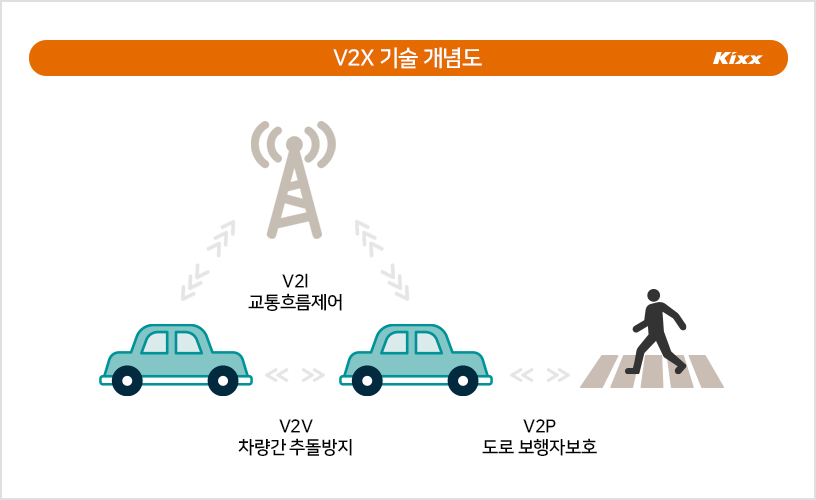
이 모든 기술을 아우르는 V2X는 차량과 차량, 인프라, 보행자 등 다양한 교통 참여자가 각각의 정보를 공유함으로써 자율주행의 완성도를 높이는 주요 기술입니다. 하지만 무선 통신을 통해 상호 연결되므로 사이버 보안에 대한 우려가 있으며, 원활한 통신을 위한 인프라의 개발이 요구됩니다.
오늘 소개한 라이다와 비전, SLAM 알고리즘, V2X는 자율주행 구현을 위한 3가지 핵심 기술입니다. LiDAR와 비전이 사람의 눈을 대신하여 주행 환경을 인식하고, SLAM 알고리즘을 통해 자율주행차가 스스로 지도를 만들고 위치를 추정하여 미지의 환경을 주행할 때, V2X 기술이 주변의 차량, 인프라, 보행자 등과 통신을 하며 자율주행의 완성도를 높일 수 있습니다.
이 같은 기술의 융합은 운전의 개념을 재정립하며, 우리를 보다 편리하고 안전한 미래로 이끌어줄 것입니다. 앞으로 다양한 요소 기술들이 탄탄한 발전을 거듭하여 더욱 완벽한 자율주행차가 등장할 수 있기를 바랍니다.