[목차]
1. 자율주행 2.5단계의 진실, 내 차는 나를 완벽히 믿지 않는다
사고 발생 시 운전자 주의 의무와 책임 소재 팩트 체크
2. 생수병 꼼수를 잡아내는 최신 센서의 원리
토크 VS 정전식(HOD) 센서의 차이
3. ADAS가 갑자기 풀려버리는 마의 구간
전방 카메라와 레이더가 사선 방향 진입 차량에 반응이 늦는 기술적 이유
고속도로 반자율주행(HDA) 한 줄 요약 📢
✅현재의 반자율주행(HDA/SCC)은 운전자를 돕는 ‘보조 장치’일 뿐, 핸들에 생수병을 끼우는 등의 행동은 사고 발생 시 시스템의 즉각적인 개입을 막아 치명적인 결과로 이어질 수 있습니다.
장거리 고속도로 주행을 하다 보면 운전 피로를 크게 줄여주는 기능이 있습니다. 바로 스마트 크루즈 컨트롤(SCC)과 고속도로 주행 보조(HDA) 같은 반자율주행 기능입니다. 이러한 기능들은 앞차와의 거리를 자동으로 유지하고, 차선 중앙을 따라 주행을 보조해 주기 때문에 장거리 운전에서 특히 유용한 기능으로 알려져 있는데요. 문제의 핵심은 ‘운전자 보조 기능’을 ‘완전 자율주행’으로 착각하는 데 있습니다.
오늘은 많은 운전자가 헷갈려 하는 반자율주행 시스템의 실제 한계와 올바른 사용법에 대하여 자세히 알아보겠습니다.
SCC나 HDA 썼는데 사고 나면, 누구 책임일까?
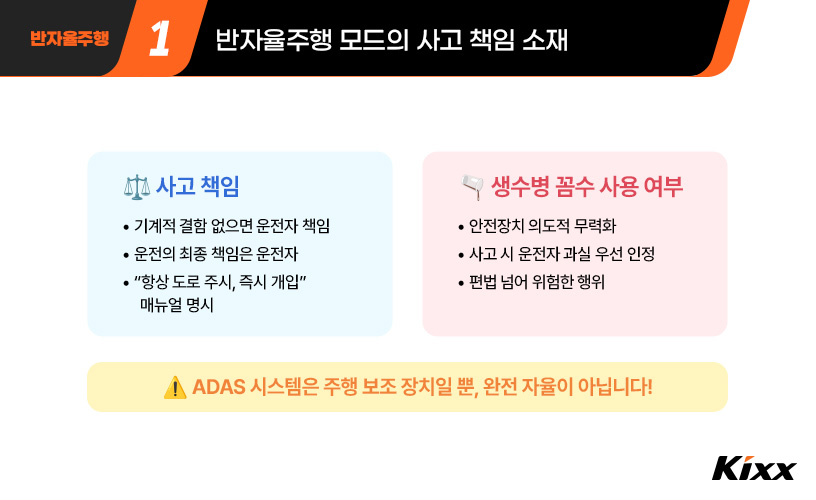
SCC나 HDA와 같은 반자율주행 기능을 켠 채 주행하다 사고가 발생하면 “내가 직접 조작한 게 아니니 제조사 책임 아닌가?”라고 생각하는 운전자도 적지 않은데요. 결론부터 말하면, 차량의 기계적 결함이 확인되지 않는 이상 사고 책임은 기본적으로 운전자에게 있습니다.
현재 대부분의 차량에 적용된 반자율주행 기능은 운전자의 조작을 보조하는 ‘운전자 보조 시스템(ADAS)’에 해당합니다. 차량이 일부 기능을 대신 수행하더라도 운전의 최종 책임은 운전자에게 있다는 것이 시스템 설계의 기본 원칙이죠.
실제로 차량 매뉴얼을 보면 공통적으로 “항상 운전자가 도로 상황을 주시하고 필요 시 즉시 개입해야 한다”는 문구가 안내되어 있습니다. 즉, 시스템이 작동 중이더라도 운전자가 전방을 주시하지 않거나 핸들 조작을 하지 않는 상태에서 사고가 발생하면 책임을 면하기 어렵습니다.
*관련글👉 알고 쓰면 더욱 안전한 ADAS 기술
따라서 제조사들도 시스템 오남용을 방지하기 위해 다양한 안전장치를 적용하고 있습니다. 일정 시간 동안 운전자가 핸들을 잡지 않으면 경고음을 울리고, 이후에도 반응이 없으면 기능을 자동으로 해제하는 방식이 대표적인데요.
한편, 핸들에 생수병이나 무게 추를 끼워 이러한 경고를 우회하는 행위는 단순한 편법을 넘어 차량의 안전장치를 의도적으로 무력화하는 행동이라 볼 수 있습니다. 만약 이런 상태에서 사고가 발생한다면 운전자의 과실이 우선적으로 인정될 가능성이 매우 높습니다.
핸들을 잡고 있는데도 자꾸 경고가 뜨는 이유는 무엇일까?
반자율주행 기능이 작동하는 차량은 일정 시간이 지나면 계기판에 “핸들을 잡으십시오”라는 경고 메시지가 표시됩니다. 이는 차량에 문제가 생긴 것이 아니라, 차량에 적용된 ‘운전자 감지 알고리즘’이 운전자의 실제 개입 여부를 확인하기 위해 작동하는 안전 장치입니다.
자동차 제조사들은 운전자가 실제로 운전에 참여하고 있는지를 확인하기 위해 주로 다음과 같은 아래와 같은 방식의 센서를 사용합니다.
① 토크 센서 방식
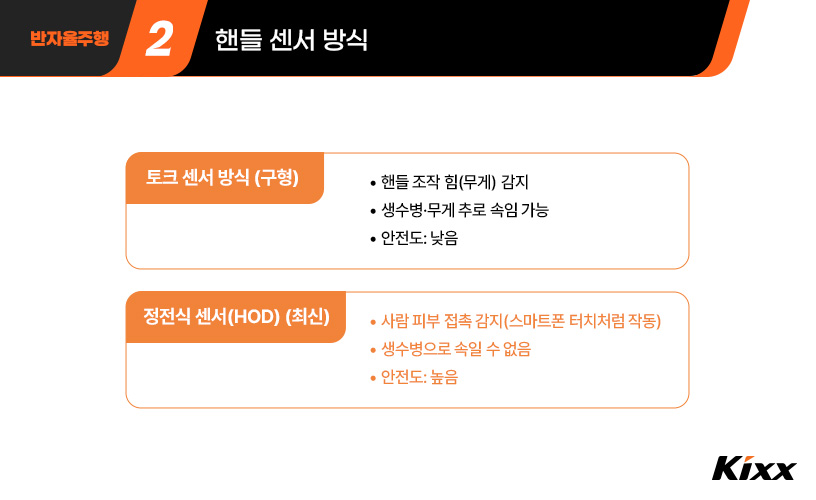
토크 센서 방식은 운전자의 손이 핸들에 닿았는지를 직접 감지하는 것이 아니라, 운전자가 스티어링 휠에 가하는 미세한 물리적 힘(토크)을 측정합니다. 즉, 운전자가 핸들을 아주 조금이라도 조작하려는 힘을 가하는지를 통해 운전자 개입 여부를 판단하는 구조입니다.
따라서 직선 도로에서 핸들을 움직이지 않은 채 단순히 손만 얹어두고 있으면, 시스템은 조향을 위한 저항이 발생하지 않는다고 판단해 운전자가 실제로 핸들을 조작하고 있지 않다고 인식할 수 있습니다. 이로 인해 일정 시간이 지나면 계기판에 핸들 조작을 요구하는 경고 메시지가 표시되기도 하죠.
② 정전식 센서(HOD, Hands On Detection) 방식
정전식 센서 방식은 스마트폰 터치스크린처럼 사람의 피부 접촉 시 발생하는 정전기를 감지해 운전자의 손이 핸들에 닿아 있는지를 판단합니다. 손을 가볍게 터치하는 것만으로도 인식이 가능하기 때문에 운전 피로도가 낮고, 생수병이나 무게 추 같은 물체로는 시스템을 속이기 어렵다는 장점이 있습니다.
다만 이 방식 역시 두꺼운 장갑을 착용하거나 한 손으로 느슨하게 잡는 경우에는 정전 신호가 충분히 전달되지 않아 경고가 발생할 수 있습니다.
스티어링 휠 핸즈오프(Hands-off) 감지 방식 비교 🔍
|
감지 방식 |
작동 원리 |
꼼수 통용 여부 |
안전도 |
|
토크 센서 방식 |
핸들을 돌리려는 미세한 물리적 힘(무게)을 감지 |
무게 추, 생수병 끼워두면 잡고 있다고 속음 |
낮음 (경고등 우회 시 대형사고 위험) |
|
정전식 센서 (HOD) |
스마트폰 터치처럼 사람의 미세 전류(피부)를 감지 |
무게 추나 물건을 끼워도 전류가 안 통하면 경고 울림 |
높음 (꼼수 차단) |
|
적외선 카메라 (운전자 모니터링) |
실내 카메라로 운전자의 시선과 눈 깜빡임 감지 |
앞을 안 보거나 졸면 즉시 경고 및 제동 |
최고 수준 (안전 보장) |
갑작스런 칼치기 차량도 시스템이 완벽하게 감지하고 멈출까?
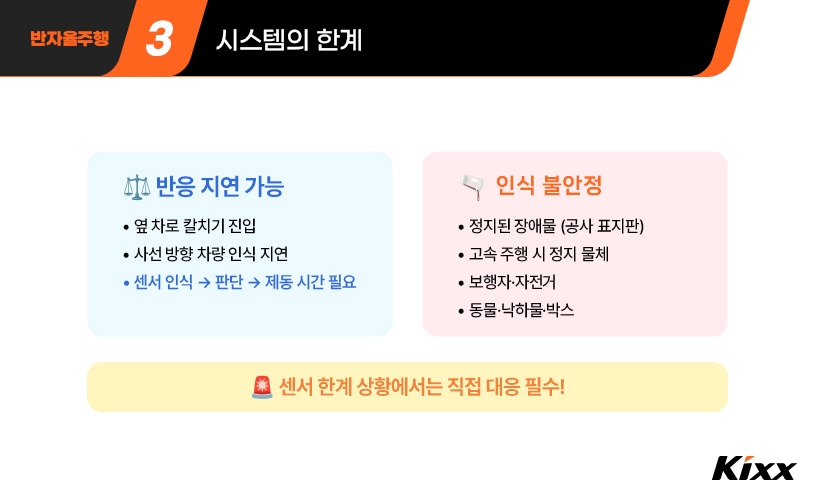
반자율주행 시스템이 취약해질 수 있는 상황 중 하나가 측면에서 급격하게 끼어드는 차량, 이른바 ‘칼치기’ 상황입니다. 차량 전면에 장착된 레이더와 카메라 센서는 전방 물체의 거리와 속도를 계산하는 데 최적화되어 있습니다. 하지만 사선 방향에서 빠른 속도로 접근하는 차량은 센서의 인식 범위(Field of View) 밖에 있다가, 차선 안으로 충분히 진입한 뒤에야 시스템에 인식되는 경우가 발생할 수 있죠.
문제는 센서가 차량을 감지하더라도 실제 제동이 걸리기까지 센서 인식 → 상황 판단 → 브레이크 유압 형성이라는 물리적인 시간이 필요하다는 점입니다. 급박한 끼어들기 상황에서는 시스템의 반응 속도보다 충돌 위험이 더 빠르게 다가올 수밖에 없습니다. 특히 렌즈 오염이나 역광 같은 외부 환경까지 겹치면 인식 정확도는 더욱 떨어지게 됩니다.
즉, SCC나 FCA(충돌 방지 보조)는 어디까지나 운전자를 돕는 ‘보조 시스템’일 뿐입니다. 모든 위험 상황에 완벽하게 대응할 수는 없다는 사실을 반드시 인지해야 하며, 특히 다음과 같은 상황에서는 시스템의 대응이 늦어질 수 있으니 각별한 주의가 필요합니다
SCC·FCA의 인식 한계
|
상황 |
시스템 대응 가능 여부 |
운전자 주의 사항 |
|
전방 차량 정속 추종 |
안정적 작동 |
일반적인 고속도로 주행 시 가장 신뢰도 높음 |
|
옆 차로 칼치기 진입 |
반응 지연 가능 |
차량이 차로 내로 완전히 진입한 후에야 인식하므로 주의 필요 |
|
정지된 장애물 (공사 표지판 등) |
인식 불안정 |
고속 주행 시 정지 물체는 인식을 못 할 수 있어 직접 대응 필수 |
|
보행자·자전거 |
한계 있음 |
센서 특성에 따라 인식률이 낮아질 수 있어 전방 주시 요망 |
|
동물·낙하물·박스 |
인식 어려움 |
센서가 물체로 인지하지 못하는 경우가 많아 즉각적인 수동 조작 필요 |
[코너 속의 코너] 고속도로 반자율주행 FAQ
Q. 썬팅을 진하게 하면 차선 인식(LKA, Lane Keeping Assist)이 잘 안 되나요?
A. 네. 영향이 있을 수 있습니다. 차선 인식 기능은 전면 유리 상단에 위치한 카메라가 도로의 차선을 촬영하고 분석하는 방식으로 작동합니다. 이 카메라의 시야는 앞유리의 투명도에 영향을 받기 때문에, 썬팅 농도가 지나치게 높아 가시광선 투과율이 낮아지면 카메라로 들어오는 빛의 양이 줄어들어 차선 인식 정확도가 떨어질 가능성이 있습니다.
특히 야간 주행이나 비·눈이 오는 날처럼 주변 환경이 어두운 상황에서는 인식 성능이 더 쉽게 영향을 받을 수 있습니다. 따라서 운전자 보조 시스템이 장착된 차량이라면 앞유리, 특히 카메라가 위치한 상단 영역에는 과도하게 어두운 썬팅을 피하는 것이 권장됩니다.
Q. 오토 하이빔(HBA, High Beam Assist)을 켜뒀는데 반대편 차가 ‘눈뽕’을 맞았다고 항의해요. 시스템 오류인가요?
A. 오토 하이빔은 전방 카메라가 상대 차량의 헤드램프나 테일램프 불빛을 감지해 상향등을 자동으로 전환하는 기능입니다. 다만 언덕길이나 커브 구간, 밝은 가로등이 있는 곳에서는 센서 인식이 늦어질 수 있고, 오토바이처럼 광원이 작은 차량도 감지가 지연될 수 있습니다.
이런 상황에서는 상향등 전환이 늦어지면서 상대 운전자에게 눈부심이 발생할 수 있습니다. 때문에 오토 하이빔 기능을 사용하더라도 자동 기능만 믿기보다는 도로 상황에 따라 운전자가 직접 하향등으로 전환해 주는 운전 매너가 필요합니다.
Q. 전방 충돌방지 보조(FCA) 기능이 있는데도 앞차를 박았어요. 시스템 결함일까?
A. 전방 충돌방지 보조(FCA)는 충돌 위험이 감지되면 경고 후 자동 제동을 시도하지만 모든 상황을 완벽하게 대응하는 장치는 아닙니다. 갑작스러운 끼어들기나 매우 짧은 차간거리 상황에서는 시스템이 반응할 시간이 부족할 수 있고, 비나 눈으로 노면이 젖어 제동거리가 길어지면 물리적인 한계 때문에 충돌을 완전히 피하지 못할 수도 있죠. 또한 센서 오염이나 악천후 환경에서는 인식 성능이 떨어질 가능성도 있습니다.
FCA는 사고를 줄이기 위한 보조 장치일 뿐이며, 운전자의 지속적인 전방 주시와 즉각적인 대응이 뒷받침될 때 비로소 제 역할을 다할 수 있습니다.
반자율주행 기능은 장거리 운전 피로를 크게 줄여주는 훌륭한 기술이지만, 이를 완전 자율주행으로 착각하는 순간 그 편리함은 위험으로 바뀝니다. 시스템이 보조하는 동안에도 운전자는 언제나 전방을 주시하고, 즉시 개입할 수 있는 자세를 갖춰야 한다는 사실을 반드시 기억해 주시기를 바랍니다!